
Description technique
Le matériel de base
Voici une description du matériel utilisé pour notre AMS dans sa version premičre. Nous avons essayé de faire au mieux avec les moyens dont nous disposions. Une partie du matériel a été achetée chez différents fabricants franįais ou étrangers. Une autre partie vient de matériels de récupération que nous avions dans un recoin de cave. Il a fallu beaucoup de temps pour arriver ā quelque chose de fonctionnel et nous n'avons pas compté nos heures de bricolage pour mettre en place ce premier prototype.
Il reste beaucoup de choses ā faire avant d'avoir une station complčte. La prochaine grosse amélioration concernera l'ajout d'autres détecteurs. Mais avant cela, il nous reste ā améliorer le systčme existant, notamment au niveau de l'autonomie électrique.
Si vous souhaitez avoir plus d'informations sur un élément en particulier, n'hésitez pas ā nous en faire part.
Le boîtier


A gauche le boîtier en cours de modification, ā droite, le boîtier finalisé.
A l'origine, il s'agissait d'un boîtier d'horodateur. Nous avons choisi ce boîtier pour des raisons pratiques : le volume correspondait ā ce que nous souhaitions y mettre ; et pour des raisons de sécurité : épaisseur de tôle de 5 mm d'acier, serrure blindée 3 points, etc).
Le support



Ce pied supporte l'ensemble de l'appareillage. Il a été réalisé ā la main par notre ami Mirko ("ā la main", comprenez "ā la disqueuse et au poste ā souder" !). Il permet de surélever l'AMS et il est suffisamment solide pour encaisser la plupart des contraintes mécaniques (poids de l'AMS, vents, chocs, etc.). Il est pourvu d'une tęte crantée et rotative sur 360 degrés pour permettre ā l'AMS d'ętre orientée dans la direction voulue.



Concernant le socle de soutien du pied, une armature de fer (4 boulons soudés avec des morceaux de fer ā béton) a été coulée dans une petite dalle de béton. Les boulons dépassant de ce support servent ā fixer le pied ā l'aide de gros écrous.
Les batteries
Nous utilisons des batteries 12 volts au plomb avec électrolyte au gel. Elles servent ā alimenter le systčme (en particulier le PC et la caméra) durant la nuit. Elles sont rechargées en journée par les panneaux solaires.
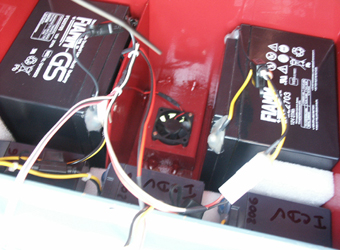
Le PC accepte directement du 12V, il n'y a donc pas besoin de transformer la tension en sortie des batteries (seuls quelques fusibles suffisent, une légčre régulation se fait via le boîtier chargeur des panneaux solaires qui fait l'intermédiaire des courants entrants et sortants).
Il y a 2 batteries principales de 27 Ah chacune. 3 autres batteries plus petites ont été ajoutées pour la ventilation du boîtier (aidées par un petit panneau solaire indépendant). Les batteries sont placées en bas du boîtier et sont recouvertes d'une grille métallique (qui sert de support aux éléments supérieurs).
Les panneaux solaires

L'AMS a été initialement conįue pour ętre autonome énergétiquement. Il a donc fallu ajouter des panneaux solaires pour assurer la recharge en journée des batteries. Pour l'AMS V1, cette alimentation solaire ne suffit pas pour assurer 100% des recouvrements énergétiques : les batteries finissent par se décharger au bout de quelques jours (max ā presque une semaine), car les besoins énergétiques sont constants la nuit (l'AMS fonctionne 8-10h consécutives la nuit) et l'ensoleillement en journée n'est pas toujours constant (nuages, journées raccourcies l'hiver, etc.). Malgré des composants demandant peu d'énergie, les panneaux solaires devraient ętre plus imposants pour pallier ā ces inconvénients. C'est le cas de l'AMS V2 (bientôt fonctionnelle) qui rčgle ce problčme par l'utilisation de panneaux solaires de plus grande surface (environ 1.5m2). Ces nouveaux panneaux ont également un meilleur rendement.
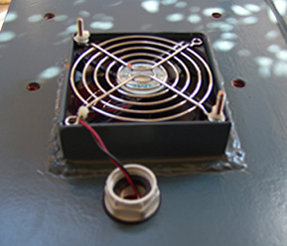
La ventilation

Une ventilation est nécessaire pour évacuer l'excédent de chaleur. Cette chaleur provient de l'AMS elle-męme (le PC est fortement sollicité et a tendance ā chauffer). En journée, l'intérieur du boîtier de l'AMS chauffe énormément avec l'ensoleillement et męme si les appareils sont désactivés en journée, cette forte température (surtout l'été) risque d'endommager les appareils.
Nous avons placé 3 ventilateurs : 1 en extraction au sommet du boîtier, sous le chapeau du panneau solaire principal, un en aspiration en bas du boîtier entre les batteries, 1 ā l'intérieur pour brasser l'air autour du PC. Ce dernier ventilateur fonctionne la journée et est alimenté par un petit panneau solaire ā l'arričre du boîtier. Plus il y a d'ensoleillement, plus le ventilateur est alimenté et donc tourne vite, et plus la ventilation est efficace.

Le boîtier chargeur solaire

Ce boîtier électronique assure la recharge des batteries via les panneaux solaires. Il est régulé, sert d'interrupteur ā la recharge et permet également de réalimenter les composants (PC, caméra) en reprenant le courant de sortie des batteries (12V).
On peut y connecter plusieurs panneaux solaires, mais actuellement un seul y est branché (le chapeau sur le boîtier). Il est fixé au boîtier par de petits aimants, ce qui permet de le redisposer ailleurs si besoin.
Nous avons ajouté une petite lampe ā leds sur piles qui est également fixée au boîtier avec des aimants (une pression sur celle-ci permet de l'allumer). Elle nous sert ā éclairer l'intérieur du boîtier lorsqu'il n'y a pas assez de lumičre.
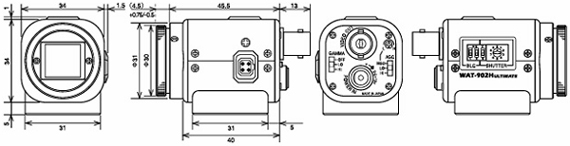
La caméra

La caméra est un des éléments les plus importants de l'AMS. Nous avons fait le choix d'une caméra analogique 12V, ultra-sensible, utilisée généralement dans le monde de l'astronomie. Cette caméra utilise un capteur CCD (Charge-Coupled Device, ou détecteurs ā couplage de charge) noir et blanc qui prend le spectre de la lumičre visible ainsi qu'une petite partie de la gamme des infrarouges. Il s'agit d'une "WAT-902H2 Ultimate" dont vous pouvez consulter les caractéristiques ici. Au moment de son acquisition, cette caméra était parmi les meilleures de sa catégorie. Elle accepte jusqu'ā une luminosité de 0.0002 lux ! Elle est extręmement petite (35.5 x 40 x 63 mm) et légčre (- de 100g).

L'objectif

La caméra seule ne servirait ā rien sans un bon objectif. En effet, la caméra n'est qu'un capteur CCD qui transforme la lumičre en signal analogique.
L'objectif ā ajouter au capteur est essentiel, car c'est lui qui va conditionner la qualité de l'image notamment en terme de luminosité.
L'objectif choisi est un "Computar" de 6mm en F0.8. L'angle est relativement grand et la luminosité est excellente.
Vous trouverez toutes les caractérisques ici (également dans la partie "outils" de ce site).
Le support de caméra

La caméra (et son objectif) est installée sur un support réglable, bricolé ā partir d'un trépied d'appareil photo. De cette maničre, on peut facilement régler l'orientation et l'angle de la caméra. Ce support est lui-męme fixé sur une petite plaque d'acier horizontale qui peut ętre déplacée verticalement. Cette plaque est fixée ā la porte du boîtier, face aux ouvertures, de maničre magnétique. Elle peut donc librement ętre déplacée de haut en bas (des rails en acier assurent la rigidité de l'ensemble).
Il y a 3 ouvertures sur la porte avant en acier. Cette porte est recouverte d'une plaque de plexiglas épaisse qui protčge également les ouvertures.
Ce plexi est suffisamment translucide pour la caméra, mais nous pensons bientôt changer cette plaque par du verre extra-transparent et sécurit (= incassable)
Nous en avons profité pour insérer un petit texte explicatif du systčme, en anglais et en franįais. Ce texte est une simple feuille A4 plastifiée, coincée entre la porte d'acier et la plaque de plexiglas qui la recouvre.

le PC

L'ordinateur va ętre l'élément qui va collecter sous forme numérique les données issues des capteurs, dont la caméra. C'est via cet ordinateur qu'un logiciel va enregistrer les données lorsque la caméra "détecte" quelque chose. Il y a donc une évaluation en temps réel de l'environnement et enregistrement de fichiers de données si la détection s'enclenche.
Pour le choix de l'ordinateur, nous avions plusieurs impératifs : une machine simple et consommant peu d'énergie, un PC sous Windows pour faire fonctionner le logiciel que nous souhaitions, un PC en 12V (et non pas 220v) pour éviter la transformation du courant depuis les batteries, enfin un ordinateur qui puisse s'allumer automatiquement en fonction d'un signal extérieur.

Le PC idéal fut trouvé : il s'agit d'un modčle que les passionnés de tunning voitures appellent un "PC-car". C'est un ordinateur conįu pour ętre intégré dans les voitures (lecteur DVD, mp3, etc.). Il est petit (la taille d'un ampli de voiture), fonctionne en 12v avec une bonne marge de tolérance, s'allume et s'éteint en fonction d'un contact hors alimentation générale (cela correspond au contact du neiman de la voiture) et basse consommation (de l'ordre de 50W). Ce type de PC ne se trouve pas ou difficilement en France. Nous l'avons acheté chez un spécialiste en Allemagne : www.CarTFT.com.
Parmi les modčles existants, celui que nous avons choisi est un PC doté d'un connecteur PCMCIA, dans le but d'y intégrer une carte d'acquisition vidéo.

Les autres pičces sont plus standards et correspondent ā des pičces de PC portables : disque dur 120Go 2,5'', processeur Intel centrino 1.8MHz 2Mo de cache, 512Mo de RAM, etc.
Pas de matériel type lecteur DVD, souris, clavier, écran, etc., tout ceci n'étant pas utile.Le PC est coupé la journée et fonctionne la nuit (via un relais et un interrupteur crépusculaire).
L'acquisition des données

Les données arrivent de la caméra par un signal analogique (par un câble composite). Il faut donc transformer ce signal analogique en numérique pour qu'il soit évalué par le programme de détection. Pour cela, nous avons intégré une carte d'acquisition simple en PCMCIA. Ne voulant qu'un signal brut sans compression, une carte d'acquisition type récepteur de télévision analogique/tnt, a suffit.
Les données sont directement analysées en temps réel par notre logiciel de détection. L'acquisition ne se fait que lorsque le PC est allumé, c'est ā dire la nuit.
Le logiciel de capture
Les vidéos ne sont pas enregistrées en continu, mais uniquement lorsqu'il y a "quelque chose" ā enregistrer. C'est le rôle du logiciel de détection : le logiciel analyse en permanence les images qui lui arrivent de la caméra et lorsqu'un mouvement se produit ou qu'une lumičre apparaît, il commande l'enregistrement de la vidéo sous forme de fichiers sur le disque dur de l'ordinateur.
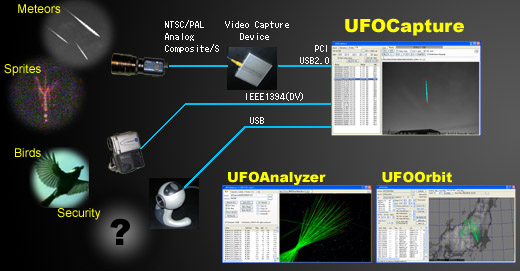
Il existe plusieurs logiciels de ce type, mais un des meilleurs actuellement se nomme "Ufocapture" qui est développé par l'équipe "Sonotaco". Il existe une version gratuite et une payante de ce logiciel. D'autres applications peuvent venir se greffer ā Ufocapture pour analyser par exemple les orbites des satellites. Nous remercions au passage le responsable de Sonotaco qui nous a aidés quant au choix de la caméra et de l'objectif de l'AMS.
L'accčs aux données
Les fichiers vidéo sont enregistrés sur le disque dur de l'ordinateur. Il faut donc réguličrement récupérer ces fichiers pour constater les éventuels phénomčnes enregistrés. De plus, la taille des fichiers étant trčs importante (fichiers vidéo bruts) et la capacité du disque dur étant limitée, il est nécessaire d'effacer ces données pour libérer de la place.

Pour faire ces transferts, on peut bien entendu se connecter directement ā la machine via un câble réseau ou USB. Mais ceci demande des manipulations peu pratiques. Nous avons donc opté pour un transfert par Wi-Fi. Nous avons ajouté une petite antenne Wi-Fi USB, placée sous le chapeau du panneau solaire et reliée au PC, ā l'intérieur du boîtier.

Nous utilisons un logiciel (RealVNC) qui permet de contrôler le PC de l'AMS ā distance (en utilisant un autre PC portable par exemple). Cet accčs se fait de maničre sécurisée (login, mot de passe) jusqu'ā un éloignement de 100-200 mčtres environ (la portée pourrait ętre augmentée en installant une antenne Wi-Fi plus performante). De cette maničre, nous n'avons pas besoin de manipuler l'AMS et les données sont récupérées tout en restant ā distance.
Le relais / interrupteur crépusculaire


Notre AMS (version 1) étant alimentée par des panneaux solaires, il est nécessaire que les éléments consommant de l'énergie soient coupés en journée (PC, caméra, ventilateurs). Pour couper l'alimentation, nous avons fabriqué un interrupteur crépusculaire. Il s'agit d'un montage électronique qui actionne un relais grâce ā un capteur de lumičre.
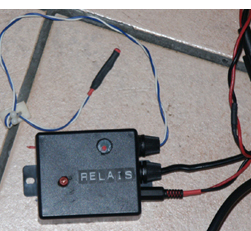
En fonction de la quantité de lumičre reįue par ce capteur (réglable et qui est face ā une des fenętres plexiglas), le relais s'actionne ou pas. Ce relais est lui-męme alimenté en permanence, mais ne consomme que peu d'énergie. Lorsque le relais (une sorte d'interrupteur) est activé, les appareils sont alimentés en 12V et une impulsion est envoyée au PC qui lui commandera de s'allumer une trentaine de secondes plus tard. Inversement, au lever du jour, le relais coupe l'alimentation électrique des appareils. De plus, nous avons disposé quelques protections, de type fusibles et interrupteurs manuels, lesquelles sont contenues dans un boîtier déporté (sous la forme d'un gros interrupteur de jardin). Vous trouverez les plans de l'interrupteur crépusculaire dans la partie "outils".
Alimentation extérieure

L'AMS V1 est alimentée grâce ā des batteries qui sont rechargées en journée par des panneaux solaires. Or, malgré cet apport d'énergie, les batteries finissent par se décharger au bout d'une durée variable. Il est alors nécessaire de les recharger en utilisant un chargeur branché sur le secteur.
Les manipulations pour recharger les batteries étant assez fastidieuses (sortir les batteries, les remplacer par des nouvelles, recharger les batteries vidées, etc.).

Nous avons finalement modifié l'AMS pour qu'elle intčgre un petit chargeur. Ce chargeur est contenu directement dans le boîtier (intercalé entre les 2 batteries principales et il peut ętre relié par un câble au secteur (220v) de l'habitation ā proximité de l'AMS.
Une prise sous le boîtier permet de brancher facilement une rallonge lorsque cela est nécessaire, puis de la retirer aussitôt la recharge effectuée (quelques heures).
Vue d'ensemble
L'ensemble est assez volumineux, mais il est difficile de concilier fonctions multiples et compacité. L'extérieur est recouvert d'une peinture résistante aux intempéries, elle-męme recouvrant une couche d'antirouille (d'oų la couleur orangée sur certaines photos). Une des derničres difficultés que nous ayons eue concerne la température intérieure du boîtier. Le problčme se pose par fortes chaleurs, car le boîtier retient énormément de chaleur malgré la présence de ventilateurs. Plus d'ouvertures auraient posé des problčmes d'étanchéité (l'eau peut s'infiltrer) et de sécurité (plus facile ā forcer). Une autre solution aurait été de peindre le boîtier avec une peinture réfléchissante, mais le problčme aurait été sa visibilité trop importante.
Les évolutions prévues sont nombreuses. Nous envisageons par exemple d'augmenter la portée du réseau WiFi pour pouvoir atteindre une connexion internet proche. De cette maničre et avec l'accord du propriétaire, nous pourrons mettre en place un contrôle de l'AMS par le web. A terme un systčme de surveillance en temps réel pour tous les internautes connectés ā ce site est envisageable.

